您现在的位置是:首页 > 变频技术 > 变频技术
位置控制变频器的闭环位置控制的技术方法
![]() 来源:艾特贸易2018-09-28
来源:艾特贸易2018-09-28
简介图 8-14 示出由机床与通用交流伺服电动机用变频器组成的系统图,图 8-15 为其控制框图(在本例中使用永磁同步电动机)。图中采用具有速度控制负反馈的位置控制。对变频器不给出直
图8-14示出由机床与通用交流伺服电动机用变频器组成的系统图,图8-15为其控制框图(在本例中使用永磁同步电动机)。图中采用具有速度控制负反馈的位置控制。对变频器不给出直接的位置指令,而是输入脉冲列。以此脉冲数的累积值作为位置指令,增大此位置指令时在正转输入加脉冲列,减小时在反转输入加脉冲列。控制此输入脉冲列的积累值和PLG的反馈脉冲列的各积累值,它们一致。下面说明正转时的实际动作。

图8-14 机应酬的工作台进给例

图8-15 闭环位置控制的框图
将指令输入的脉冲(在计数器内用作加法脉冲)和PLG的脉冲(在计数器内用作减法脉冲)在同一计数器内的时时刻刻地作计算,以计数器的积累值作为速度指令。因此,刚达到目标位置,计数器的积累值就刚好为零,速度指令也变为零,电动机就停止在该位置上。另外,计数器的积累值变得很小时,从决定判断电路发出决定位置完了信号,通知位置控制结束。
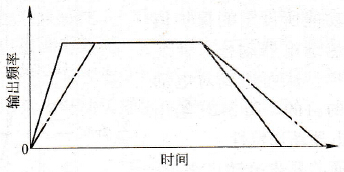
由于进行这样的控制,如果脉冲列输入的频率一定,电动机将具有定速运转的特性,其转速与输入的频率成比例。但是,以某速度运转时必须有速度指令,换句话说,使计数器保持一个与速度相适应的值位置偏差,这就是图8-16所示的过渡位置偏差。另外,越是追不上电动机转速的上升,输入脉冲列的频率越上升,计数器就过量了,输入脉冲的一部分失去作用,目标位置不准,所以要注意,为了防止在目标位置不准情况下继续运转,多采用计数器一过量就利用“误差过大”警报信号使电动机停止运转。
在这种用途中使用的PLG产生两个具有90°相位差的脉冲列信号,监视这两个脉冲信号上升的顺序可以判别正反转,还有,电动机每转一周,在特定的转子位置上产生显示器脉冲,可以用作位置原点的确定。

图8-16 过渡位置偏差
PLG的反馈脉冲在进入计数器前要通过递减电路。在递减电路把PLG的脉冲列分频为整数分之一,目的是改变对于1个输入脉冲的位置变化量(增益)。所以,如果分频为1/n,对于1个输入脉冲PLG要n个脉冲电动机才旋转。
另外,作为采用开环控制,每次只旋转1个输入脉冲所决定的旋转角的电动机,被称为脉冲电动机,它利用功放后的脉冲列直接传动特殊的同步电动机,与图8-15的方式相比有加减速中没有位置偏差的特点,但限于很小容量。
(作者稿费要求:需要高清无水印文章的读者3元每篇,请联系客服,谢谢!在线客服: )
)