您现在的位置是:首页 > 电路图 > 电路图学习 > 电路图学习
浅析无刷直流电机,无刷直流电机的工作原理及其结构构成
![]() 转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-08-18
转载来源:电子技术应用-AET chinaaet.com 电子发烧友 elecfans.com2017-08-18
简介无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机。早在十九纪诞生电机的时候,产生的
无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机。早在十九纪诞生电机的时候,产生的实用性电机就是无刷形式,即交流鼠笼式异步电动机,这种电动机得到了广泛的应用。但是,异步电动机有许多无法克服的缺陷,以致电机技术发展缓慢。上世纪中叶诞生了晶体管,因而采用晶体管换向电路代替电刷与换向器的直流无刷电机就应运而生了。这种新型无刷电机称为电子换向式直流电机,它克服了第一代无刷电机的缺陷。
本文要介绍电机种类中发展快速且应用广泛的无刷直流电机(以下简称BLDC)。BLDC被广泛的用于日常生活用具、汽车工业、航空、消费电子、医学电子、工业自动化等装置和仪表。 顾名思义,BLDC不使用机械结构的换向电刷而直接使用电子换向器,在使用中BLDC相比有刷电机有许多的优点。
BLDC(无刷直流电机)的结构
直流无刷电机是同步电机的一种,也就是说电机转子的转速受电机定子旋转磁场的速度及转子极数(p)影响:
n=60.f / p。在转子极数固定情况下,改变定子旋转磁场的频率就可以改变转子的转速。直流无刷电机即是将同步电机加上电子式控制(驱动器),控制定子旋转磁场的频率并将电机转子的转速回授至控制中心反复校正,以期达到接近直流电机特性的方式。也就是说直流无刷电机能够在额定负载范围内当负载变化时仍可以控制电机转子维持一定的转速。
直流无刷驱动器包括电源部及控制部:电源部提供三相电源给电机,控制部则依需求转换输入电源频率。
电源部可以直接以直流电输入(一般为24v)或以交流电输入(110v/220 v),如果输入是交流电就得先经转换器转成直流。不论是直流电输入或交流电输入要转入电机线圈前须先将直流电压由换流器转成3相电压来驱动电机。换流器一般由6个功率晶体管(q1~q6)分为上臂(q1、q3、q5)/下臂(q2、q4、q6)连接电机作为控制流经电机线圈的开关。控制部则提供pwm(脉冲宽度调制)决定功率晶体管开关频度及换流器换相的时机。直流无刷电机一般希望使用在当负载变动时速度可以稳定于设定值而不会变动太大的速度控制,所以电机内部装有能感应磁场的霍尔传感器,做为速度之闭回路控制,同时也做为相序控制的依据。但这只是用来做为速度控制并不能拿来做为定位控制。
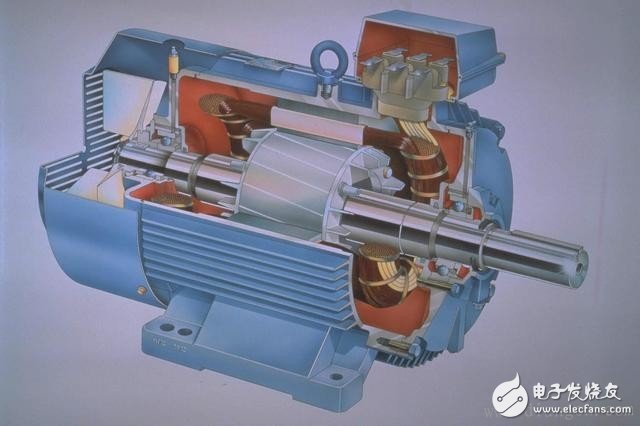
1、定子
BLDC定子是由许多硅钢片经过叠压和轴向冲压而成,每个冲槽内都有一定的线圈组成了绕组,可以参见下图。从传统意义上讲,BLDC的定子和感应电机的定子有点类似,不过在定子绕组的分布上有一定的差别。大多数的BLDC定子有3个呈星行排列的绕组,每个绕组又由许多内部结合的钢片按照一定的方式组成,偶数个绕组分布在定子的周围组成了偶数个磁极。

图2.1.1. BLDC内部结构
BLDC的定子绕组可以分为梯形和正弦两种绕组,它们的根本区别在于由于绕组的不同连接方式使它们产生的反电动势(反电动势的相关介绍请参加EMF一节)不同,分别呈现梯形和正弦波形,故用此命名了。梯形和正弦绕组产生的反电动势的波形图如下图。
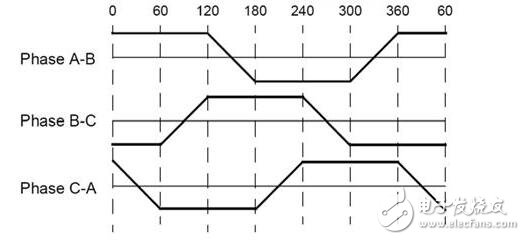
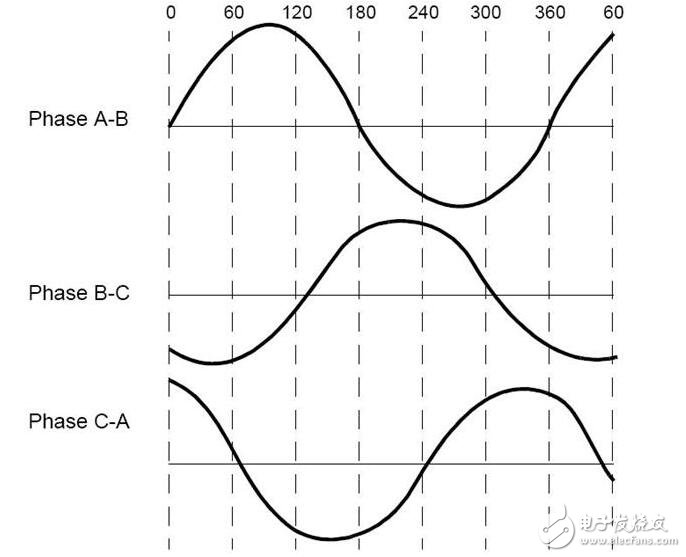
另外还需要对反电动势的一点说明就是绕组的不同其相电流也是呈现梯形和正弦波形,可想而知正弦绕组由于波形平滑所以运行起来相对梯形绕组来说就更平稳一些。但是,正弦型绕组由于有更多绕组使得其在铜线的使用上就相对梯形绕组要多。
平时由于应用电压的不同,我们可以根据需要选择不同电压范围的无刷电机。48V及其以下应用电压的电机可以用在汽车、机器人、小型机械臂等方面。100V及其以上电压范围的电机可以用在专用器具、自动控制以及工业生产领域。
2、转子
定子是2至8对永磁体按照N极和S极交替排列在转子周围构成的(内转子型),如果是外转子型BLDC那么就是贴在转子内壁咯。如图2.2.1所示;
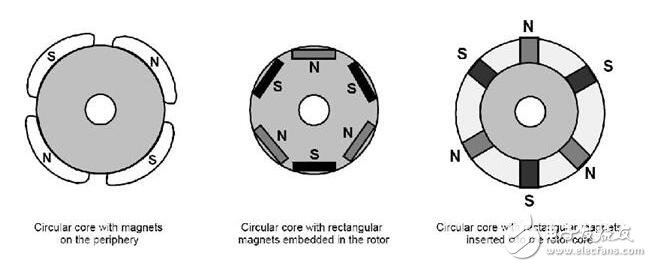
图2.2.1 转子磁极排布
3、霍尔传感器
与有刷直流电机不同,无刷直流电机使用电子方式换向。要使BLDC转起来,必须要按照一定的顺序给定子通电,那么我们就需要知道转子的位置以便按照通电次序给相应的定子线圈通电。定子的位置是由嵌入到定子的霍尔传感器感知的。通常会安排3个霍尔传感器在转子的旋转路径周围。无论何时,只要转子的磁极掠过霍尔元件时,根据转子当前磁极的极性霍尔元件会输出对应的高或低电平,这样只要根据3个霍尔元件产生的电平的时序就可以判断当前转子的位置,并相应的对定子绕组进行通电。
霍尔效应:当通电导体处于磁场中,由于磁场的作用力使得导体内的电荷会向导体的一侧聚集,当薄平板通电导体处于磁场中时这种效应更为明显,这样一侧聚集了电荷的导体会抵消磁场的这种影响,由于电荷在导体一侧的聚集,从而使得导体两侧产生电压,这种现象就称为霍尔效应,E.H霍尔在1879年发现了这一现象,故以此命名。
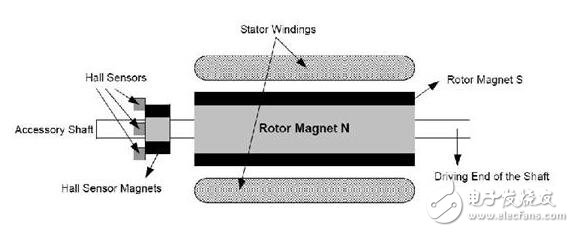
图2.3.1 霍尔传感器测量原理
图 2.3.1显示了NS磁极交替排列的转子的横截面。霍尔元件安放在电机的固定位置,将霍尔元件安放到电机的定子是比较复杂的,因为如果安放时位置没有和转子的磁场相切那么就可能导致霍尔元件的测量值不能准确的反应转子当前的位置,鉴于以上原因,为了简化霍尔元件的安装,通常在电机的转子上安装一颗冗余的磁体,这个磁体专门用来感应霍尔元件,这样就能起到和转子磁体感应的相同效果,霍尔元件一般按照圆周安放在印刷电路板上并配备了调节盖,这样用户就可以根据磁场的方向非常方便的调节霍尔元件的位置以便使它工作在最佳状态。
霍尔元件位置的安排上,有60夹角和120夹角两种。基于这种摆放形式,BLDC的电流换向顺序由制造厂商制定,当我们控制电机的时候就需要用到这种换向顺序。
注意:霍尔元件的电压范围从4V到24V不等,电流范围从5mA到15mA不等,所以在考虑控制器时要考虑到霍尔元件的电流和电压要求。另外,霍尔元件输出集电极开路,使用时需要接上拉电阻。
无刷直流电机的工作原理
无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体 ,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。
直流电机具有响应快速、较大的起动转矩、从零转速至额定转速具备可提供额定转矩的性能,但直流电机的优点也正是它的缺点,因为直流电机要产生额定负载下恒定转矩的性能,则电枢磁场与转子磁场须恒维持90°,这就要藉由碳刷及整流子。碳刷及整流子在电机转动时会产生火花、碳粉因此除了会造成组件损坏之外,使用场合也受到限制。交流电机没有碳刷及整流子,免维护、坚固、应用广,但特性上若要达到相当于直流电机的性能须用复杂控制技术才能达到。现今半导体发展迅速功率组件切换频率加快许多,提升驱动电机的性能。微处理机速度亦越来越快,可实现将交流电机控制置于一旋转的两轴直角坐标系统中,适当控制交流电机在两轴电流分量,达到类似直流电机控制并有与直流电机相当的性能。
此外已有很多微处理机将控制电机必需的功能做在芯片中,而且体积越来越小;像模拟/数字转换器(analog-to-digital converter,adc)、脉冲宽度调制(pulse wide modulator,pwm)…等。直流无刷电机即是以电子方式控制交流电机换相,得到类似直流电机特性又没有直流电机机构上缺失的一种应用。
1、操作原理
每一次换向都会有一组绕组处于正向通电;第二组反相通电;第三组不通电。转子永磁体的磁场和定子钢片产生的磁场相互作用就产生了转矩,理论上,当这两个磁场夹角为90?时会产生最大的转矩,当这两个磁场重合时转矩变为0,为了使转子不停的转动,那么就需要按顺序改变定子的磁场,就像转子的磁场一直在追赶定子的磁场一样。典型的“六步电流换向”顺序图展示了定子内绕组的通电次序。
2、转矩/转速特性
图 2.5.1 转矩和速度特性显示了转矩和转速特性。BLDC一共有两种转矩度量:最大转矩和额定转矩。当电机连续运转的时候表现出来的就是额定转矩。在无刷电机达到额定转速之前,转矩不变,无刷电机最高转速可以达到额定转速的150%,但是超速时电机的转矩会相应下降。
在实际的应用中,我们常常会让带负载的电机启动、停转和逆向运行,此时就需要比额定转矩更大的转矩。特别是当转子静止和反方向加速时启动电机,这个时候就需要更大的转矩来抵消负载和转子自身的惯性,这个时候就需要提供最大的转矩一直到电机进入正向转矩曲线阶段。
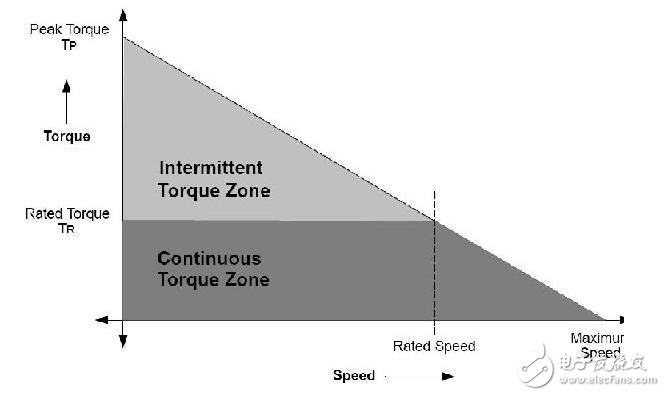
图2.5.1 转矩和速度特性