您现在的位置是:首页 > PLC技术 > PLC技术
FX2N系列PLC的PID运算指令
![]() 来源:艾特贸易2017-06-04
来源:艾特贸易2017-06-04
简介(1) PID 运算指令的助记符、指令代码、操作数及程序步如表 6- 94 所列。 表 6 - 94 PID 运算指令 (2) 指令梯形图如图 6-157 所示。 图 6 - 157 PID 运算指令梯形图 (3) 指令说明: ① PID 指令用的
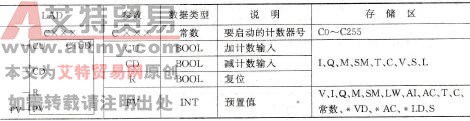
(1) PID运算指令的助记符、指令代码、操作数及程序步如表6- 94所列。
表6 - 94 PID运算指令

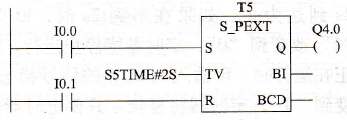
(2)指令梯形图如图6-157所示。
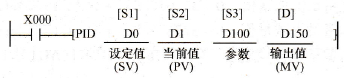
图6 - 157 PID运算指令梯形图
(3)指令说明:
①PID指令用的算术表达式为
![]()
式中 KP-比例放大系数,由[S3]+3设定;
δ-偏差,偏差=当前值(反馈值)-设定值(目标值);
KD-微分放大系数,由[S3]+5设定;
TD-微分时间常数,由[S3]+6设定;
Tr-积分时间常数,由[S3]+4设定。
②本指令是将当前过程值[S2]与设定值[S1]之差(偏差)送到PID环节中计算,得到当前输出控制值送到目标[D]中。[S3]指定PID运算的参数表首地址,该参数表需占用25个数据寄存器,因而首元件号不可大于D7975。本指令在编程时可多次使用,但应注意各PID环节占用的数据寄存器D不可重复。PID指令有特定出错码,出错标志为M8067,相应的出错码存放在D8067。
③PID参数表占用[S3]指定的首元件开始的连续25个数据寄存器。用保持型数据寄存器以保持所设参数。参数表中一部分必须由用户在PID运算前用指令写入,一部分留作内部运算用,还有一部分是存放运算结果的。
[S3] 采样时间(Ts:) 1ms- 32767ms
[S3]+1 动作方向(ACT)bit0 0:正动作1:逆动作
bit1 0:输入量报警OFF 1:输入量报警ON
bit2 0:输出量报警OFF 1:输出量报警ON
bit3:保留
bit4 0:自动调谐OFF 1:自动调谐ON
bit5 0:输出值上、下限设定OFF 1:输出值上、下限设定ON
bit6 - bit15保留
另外,不要使bit5和bit2同时处于ON
[S3]+2输入滤波常数(a) 0-99% 0时没有输入滤波
[S3]+3 比例增益(Kp) 1-32767( 0-10)
[S3]+4积分时间(Ti) 0-32767(%) 0时作为∞处理(无积分)
[S3]+5微分增益(KD) 1- 100(%) 0时无微分增益
[S3]+6微分时间(TD) 3- 32767(×10ms)0时无微分处理
[S3]+7
[S3]+19 PID
[S3]+20过程量最大增量值0- 32767([S3]+1<ACT>的bit1=1时有效)
[S3l+21过程量最大减量值0- 32767([ S3]+I<ACT>的bit1=1时有效)
[S3]+22输出增量报警设定值0- 32767([S3]+1<ACT>的bit2=1,bit5=0时有效)
另外,输出上限设定值-32768 - 32767([S3]+1<ACT>的bit2=0,bit5=1时有效)
[S3] +23输出减量报警设定值0- 32767([S3]+1<ACT>的bit2=1,bit5=0时有效)
另外,输出下限设定值-32768 - 32767([S3]+1<ACT>的bit2=0,bit5=1时有效)

但[S3] +20 -[S3]+ 24在[S3]+1<ACT>的bit1=1,bit2=1或bit5=1时被占用。
·PID指令在定时器中断、子程序、步进梯形图、跳转指令中也可使用。在这种情况下执行PID指令前清除[S3]+7后再使用。
·采样时间Ts的最大误差为-(1扫描周期+1ms)-+1扫描周期。Ts的数值较小时,这种误差将成为问题。在这种情况下,执行恒定扫描模式或在定时器中断程序中编程,以解决该问题,如图6-158所示。

图6-158 在定时中断用PID指令梯形图
·输入滤波常数有使测定值变化平滑的效果。
·微分增益有缓和输出值急剧变化的效果。
·动作方向([S3]+1<ACT>)。
正动作是指当前值大于设定值SV时,加大执行量。例如,空调控制,空调未启动时室温上升,超过设定值,则启动空调。
逆动作是指当前值小于设定值SV时,加大执行量。例如,加热炉,当炉温低于设定值时必须投入加热装置以升高炉温。
①动作方向:bit0=0为正动作,bit0=1为逆动作。
②输出值上、下限设定[bit5]:输出值上、下限设定有效([S3]+1<ALT>的bit5=1)的情况下,输出值如图6 - 159所示。如果使用这种设定,也有抑制PID控制的积分项增大的效果。另外,使用这个功能时,必须使[S3] +1(ACT)的bit2设为OFF。
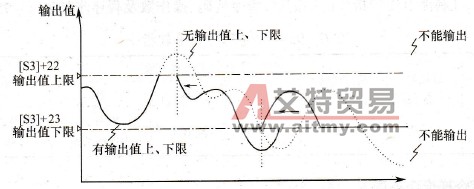
图6 – 159 上、下限设定
③报警设定(过程量、输出量)[bit1,bit2]:
使[S3]+1<ACT>的bit1、bit2 ON后,可以监察过程量和输出量。过程量、输出量与[S3]+20 - [S3]+23的值进行比较,超过设定值时,报警标志[S3] +24的相应各bit在该PID指令执行后立刻ON(图6-160)。但是,[S3] +21、[S3] +23作为报警值使用时,设定值作为负值处理。另外,使用输出变化量的报警功能时,[S3]+1<ACT>的bit5必须被设置为OFF。
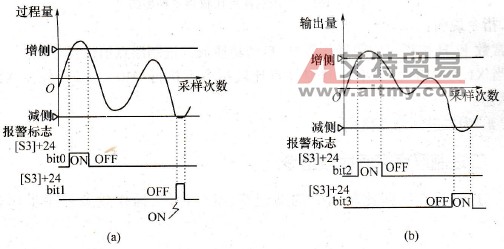
图6 – 160 报警设定
(a)过程量(bit=1);(b)输出量(bit=1)。
(a)变化量是:上次采样值一本次采样值=变化量。
(b)报警标志的动作是([S3]+24)。
点击排行
 PLC编程的基本规则
PLC编程的基本规则