您现在的位置是:首页 > 变频技术 > 变频技术
西门子MM440变频器在位置控制中的应用
![]() 来源:艾特贸易2018-04-21
来源:艾特贸易2018-04-21
简介一、位置控制概述 位置控制是指在指定时刻将被控对象的位置自动控制到预定目标位置,并使控制后的位置与目标位置之差保持在允许偏差内。这种控制系统称自动位置控制系统 (Aut
一、位置控制概述
位置控制是指在指定时刻将被控对象的位置自动控制到预定目标位置,并使控制后的位置与目标位置之差保持在允许偏差内。这种控制系统称自动位置控制系统(Auto Position Control System,APCS)。
在工业生产中位置控制非常常见,如冶金企业的轧制过程中的轧辊辊缝和轧机导板开度的控制,各种运料、布料小车的行程控制。
在许多APCS应用中,位置控制部分大多由计算机或PLC加模块构成。传动部分对精度要求不高的采用不调速的交流传动,对定位精度和响应速度要求高的设备则采用直流调速传动。随着电子功率器件技术的发展,变频器性能不断得到提高,而价格也迅速降低,使变频调速技术得到了广泛的应用,在许多场所变频调速已经取代传统的直流调速,这为构成APCS系统提供了一种新思路和新办法。
二、系统的构成
位置控制系统的构成如图4-12所示,主要由位控器(位置控制器)、变频器、执行机构三大部分组成。在实际工程中,计算机终端和PLC不必专为APCS专配,可与生产线中自动化系统共用一套终端和PLC。

图4-12 位置控制系统的构成
1.位控器
位控器选用德国Lenord+Bauer公司的GEL8310A型产品,它采用微处理器控制、模块式结构,由CPU地板、开关量I/O板、模拟量I/O模板、通信接口板构成,可同时控1~3轴。控制器输出为10V和±10V可选。参数的输入、调整、显示均可在面板上实现,也可通过RS232或RS485由上位机上实现一对一或一对多的通信实现。
2.变频器
变频器采用SIEMENS第四代通用变频器MM440系列,其脉冲宽度调制的开关频率是可选的,可以选装编码器实现真正闭环的矢量控制。
3.执行机构
执行机构为普通笼型异步电动机经减速箱通过丝杠带动下车往返行走。电动机功率为5.5kW,转速为960r/min。位置检测采用增量式光电编码器,安装在丝杠上,分辨率为1000脉冲/r。
三、工作原理
1.定位过程
首先,操作人员通过面板或计算机终端输入小车的预期位置,即位置设定值。当PLC给位控器和变频器发出启动运行命令后,位控器经运算后输出调节信号给变频器,变频器按照位控器的要求控制电动机的加速、运行、减速和制动停止,最后使小车停止在预期的设定位置上。
2.控制原理
位置控制调节原理如图4-13所示。

图4-13 位置控制调节原理
图4-13中,vt为速度预设定时间变量;St是位置预设定时间变量,St=∫vtdt; Ksp为比例放大系数;v为输出速度;Kvu为速度/电压转换器;Ut为输出电压。
控制器调节过程如下:控制器根据传动装置的机器参数、预先设定的位置和速度值,计算出速度时间特性曲线vt和St;在每一周期的开始,传动装置先根据速度预设定进行速度预控制;同时,反馈回来的实际值与St进行比较计算,得出的偏差与Ksp相乘后叠加到vt上,得出传动装置应该具有的速度;经速度/电压转换和D/A转换向传动系统发出控制信号,至执行机构定位。
3.位置控制的基本要求
电动机的速度一般按梯形速度图进行控制。在不同的使用条件下,最合理的速度图也不一样。图4-14是两种最常用的速度曲线,其中最大速度、加减速时间需根据设备和生产工艺确定,在S型加速段,速度逐渐增加,可避免冲击;在减速阶段,速度在最后阶段越来越小,有利于准确停机。

图4-14 两种常用的速度曲线
为了准确对运动设备进行位置控制,一般有如下要求:①电动机转矩不得超过电动机和机械设备的最大允许值;②能在最短时间内完成定位动作,并且定位精度符合;③控制过程中不能产生超调,且系统稳定重复性好。因此,在位置调节控制器一般采用纯比例调节器。为了满足上述要求,必须按照最佳控制曲线进行控制。
4.定位过程分析
基本定位过程曲线如图4-15所示,0~t1为加速段,加速度为am;t1~t2为最高运转段,其速度为Vm;t2~t3为减速段,加速度是-am;t3~t4为自由滑行段。t3时刻为调整机械设备进入允许误差的起始时间,在此时刻撤销速度给定,设备依惯性继续滑行,由机械摩擦使其停机。

图4-15 基本定位过程曲线
根据图4-15,定位运动关系如下
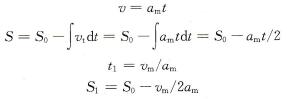
设t3~t4自由滑行的行程为Se,摩擦力产生的减速度为A,则
Se=V3/(2A)
对于定位精度要求不高或机械惯性不太大,并且电动机带制动功能的系统,上述曲线完全能够满足生产工艺的要求。对于定位要求较高,惯性大或电动机制动能力不足的系统,由于传动系统滞后的影响和允许的误差带太窄,采用上述定位曲线还不能令人满意。要确保定位误差小于允许值,可以采取降低或提高加速度的方法,从两方面来减小S。在实际应用中,常利用变频器直流制动的功能增大A的方法,获得了很好的效果。
5.位置检测
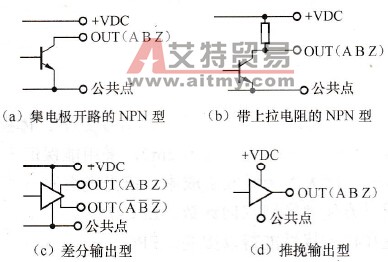
定位控制中位置的检测一般用增量式光电编码器。编码器的输出信号有A、B、Z三路。A、B两路脉冲相差90°,可以方便地判断转向。脉冲也叫零脉冲,于基准的定位清零。位置分辨率u由编码器反馈脉冲数Pt和编码器一转所对应的机械位移△L共同决定,即
u=△L/Pt
四、变频器的主要参数
为了提高设备的整体性能,实现远端对变频的综合控制,本例采用PROFIBUS-DP协议,通过网络对变频控制。位置控制系统变频器的主要参数设置见表4-1。
表4-1 位置控制系统的变频器参数设置

(作者稿费要求:需要高清无水印文章的读者3元每篇,请联系客服,谢谢!在线客服: )
)